
學習筆記:使用 OpenCV 識別 QRCode
背景
識別二維碼的項目數不勝數,每次都是開箱即用,方便得很。
這次想用 OpenCV 從零識別二維碼,主要是溫習一下圖像處理方面的基礎概念,熟悉 OpenCV 的常見操作,以及了解二維碼識別和編碼的基本原理。
作者本人在圖像處理方面還是一名新手,采用的方法大多原始粗暴,如果有更好的解決方案歡迎指教。
QRCode
二維碼有很多種,這裡我選擇的是比較常見的 QRCode 作為探索對象。QRCode 全名是 Quick Response Code,是一種可以快速識別的二維碼。
尺寸
QRCode 有不同的 Version ,不同的 Version 對應著不同的尺寸。將最小單位的黑白塊稱為 module ,則 QRCode 尺寸的公式如下:
Version V = ((V-1)*4 + 21) ^ 2 modules
常見的 QRCode 一共有40種尺寸:
Version 1 : 21 * 21 modules
Version 2 : 25 * 25 modules
…
Version 40: 177 * 177 modules
分類
QRCode 分為 Model 1、Model 2、Micro QR 三類:
Model 1 :是 Model 2 和 Micro QR 的原型,有 Version 1 到 Version 14 共14種尺寸。
Model 2 :是 Model 1 的改良版本,添加了對齊標記,有 Version 1 到 Version 40 共40種尺寸。
Micro QR :只有一個定位標記,最小尺寸是 11*11 modules 。
組成
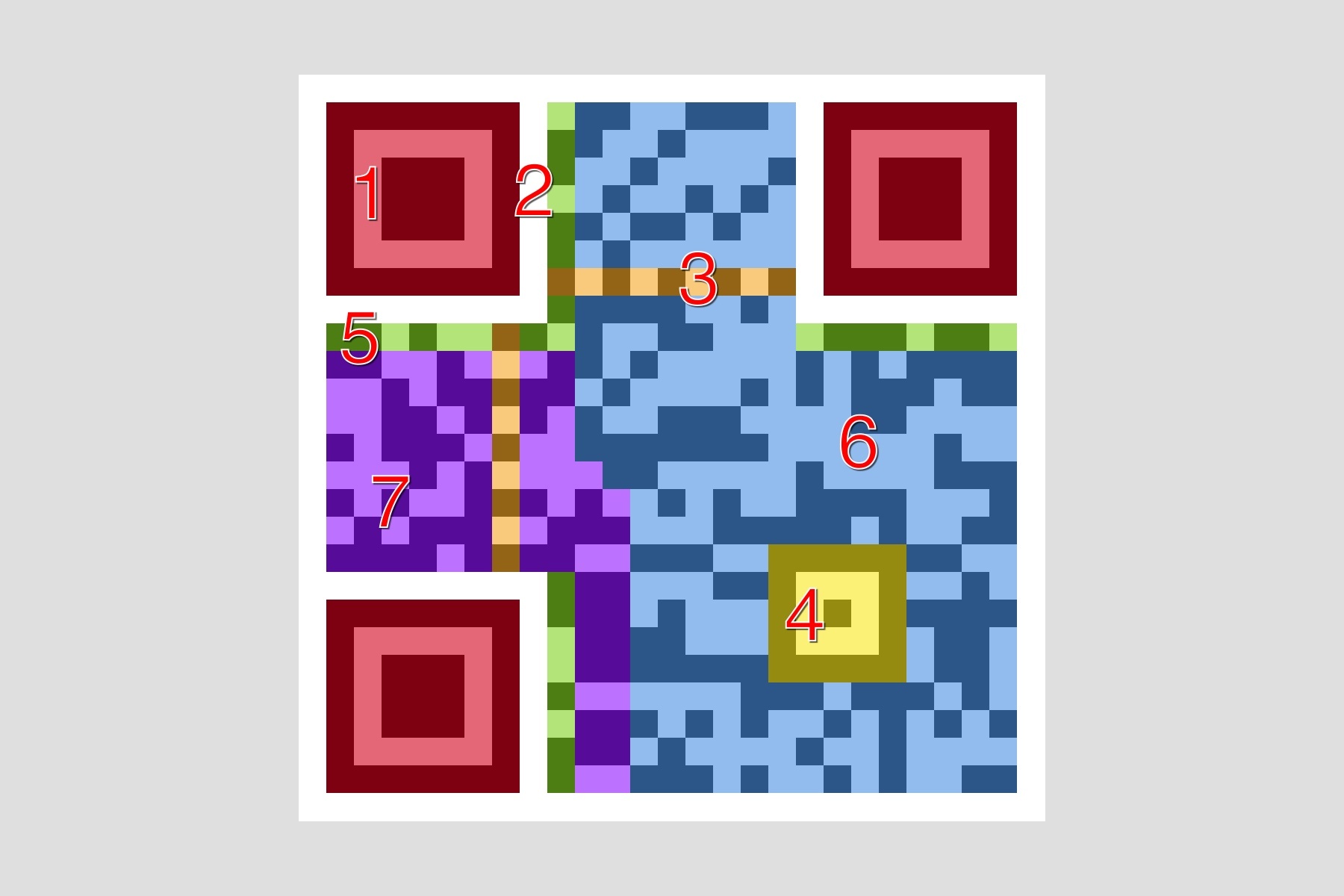
QRCode 主要由以下部分組成:
1 - Position Detection Pattern:位於三個角落,可以快速檢測二維碼位置。
2 - Separators:一個單位寬的分割線,提高二維碼位置檢測的效率。
3 - Timing Pattern:黑白相間,用於修正坐標系。
4 - Alignment Patterns:提高二維碼在失真情況下的識別率。
5 - Format Information:格式信息,包含了錯誤修正級別和掩碼圖案。
6 - Data:真正的數據部分。
7 - Error Correction:用於錯誤修正,和 Data 部分格式相同。
具體的生成原理和識別細節可以閱讀文末的參考文獻,比如耗子叔的這篇《二維碼的生成細節和原理》。
由於二維碼的解碼步驟比較復雜,而本次學習重點是數字圖像處理相關的內容,所以本文主要是解決二維碼的識別定位問題,數據解碼的工作交給第三方庫(比如 ZBAR)完成。
OpenCV
在開始識別二維碼之前,還需要補補課,了解一些圖像處理相關的基本概念。
contours
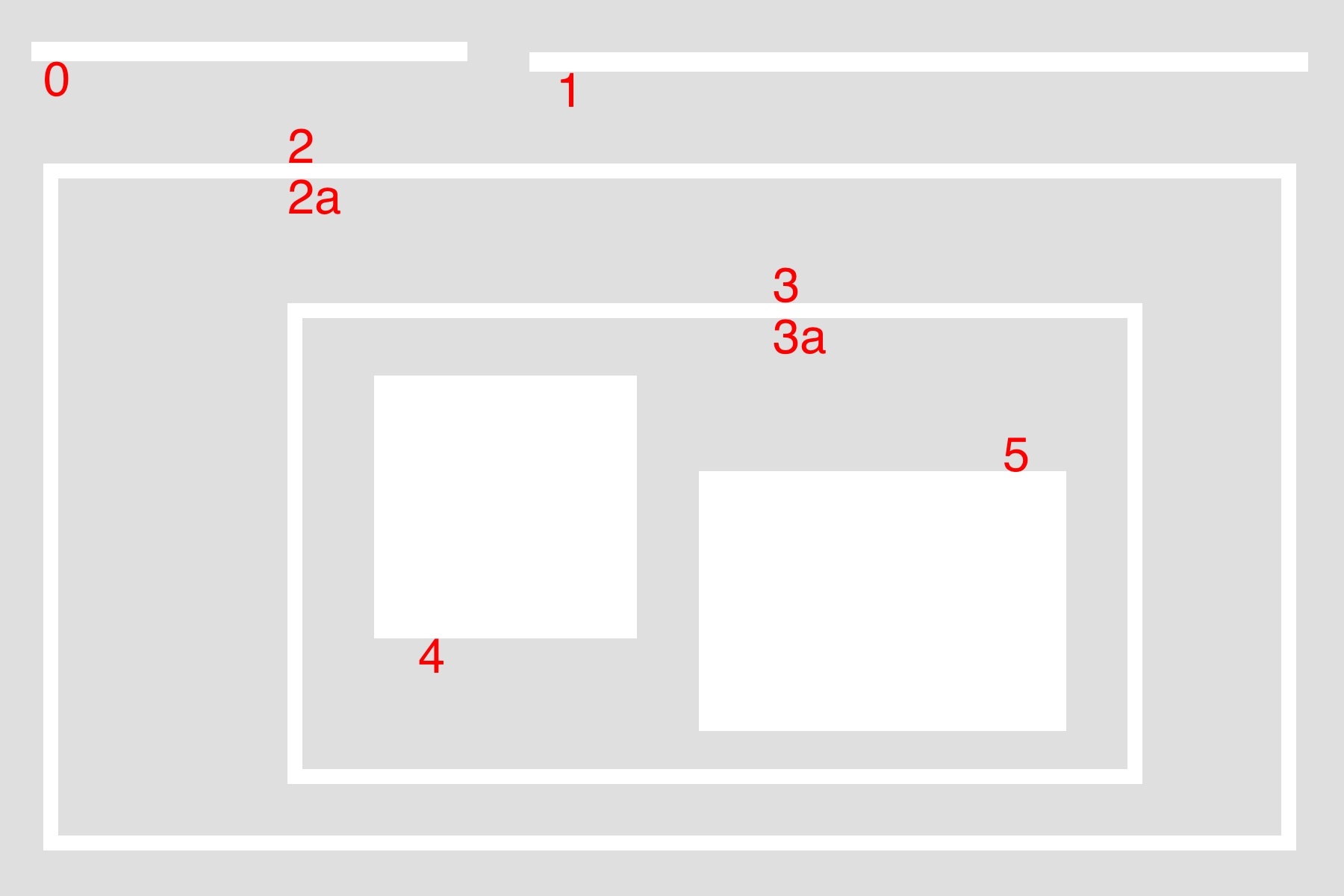
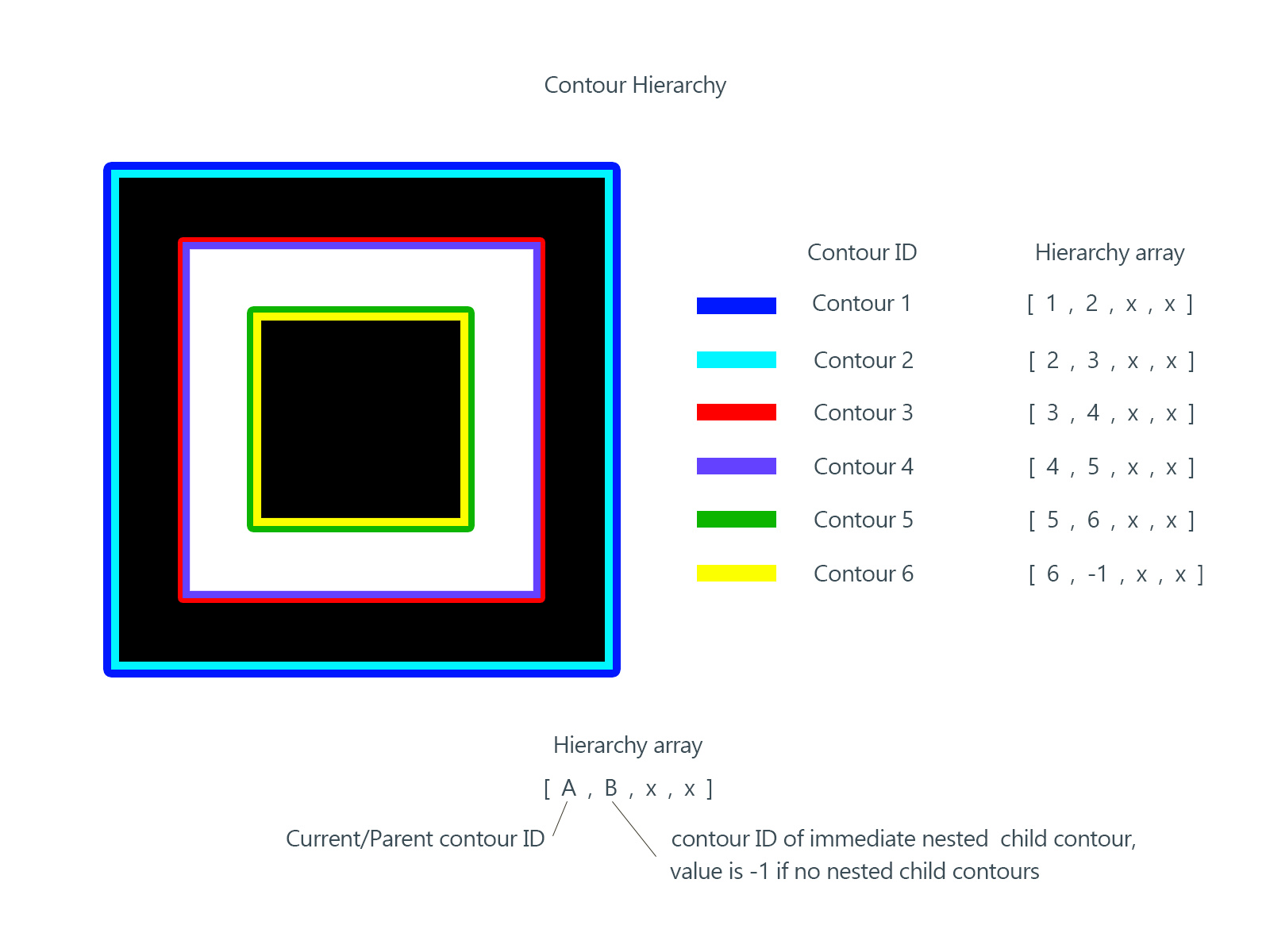
輪廓(contour)可以簡單理解為一段連續的像素點。比如一個長方形的邊,比如一條線,比如一個點,都屬於輪廓。而輪廓之間有一定的層級關系,以下圖為例:
主要說明以下概念:
external & internal:對於最大的包圍盒而言,2 是外部輪廓(external),2a 是內部輪廓(internal)。
parent & child:2 是 2a 的父輪廓(parent),2a 是 2 的子輪廓(child),3 是 2a 的子輪廓,同理,3a 是 3 的子輪廓,4 和 5 都是 3a 的子輪廓。
external | outermost:0、1、2 都屬於最外圍輪廓(outermost)。
hierarchy level:0、1、2 是同一層級(same hierarchy),都屬於 hierarchy-0 ,它們的第一層子輪廓屬於 hierarchy-1 。
first child:4 是 3a 的第一個子輪廓(first child)。實際上 5 也可以,這個看個人喜好了。
在 OpenCV 中,通過一個數組表達輪廓的層級關系:
[Next, Previous, First_Child, Parent]
Next:同一層級的下一個輪廓。在上圖中, 0 的 Next 就是 1 ,1 的 Next 就是 2 ,2 的 Next 是 -1 ,表示沒有下一個同級輪廓。
Previous:同一層級的上一個輪廓。比如 5 的 Previous 是 4, 1 的 Previous 就是 0 ,0 的 Previous 是 -1 。
First_Child:第一個子輪廓,比如 2 的 First_Child 就是 2a ,像 3a 這種有兩個 Child ,只取第一個,比如選擇 4 作為 First_Child 。
Parent:父輪廓,比如 4 和 5 的 Parent 都是 3a ,3a 的 Parent 是 3 。
關於輪廓層級的問題,參考閱讀:《Tutorial: Contours Hierarchy》
findContours
了解了 contour 相關的基礎概念之後,接下來就是在 OpenCV 裡的具體代碼了。
findContours 是尋找輪廓的函數,函數定義如下:
cv2.findContours(image, mode, method) → image, contours, hierarchy
其中:
image:資源圖片,8 bit 單通道,一般需要將普通的 BGR 圖片通過 cvtColor 函數轉換。
mode:邊緣檢測的模式,包括:
CV_RETR_EXTERNAL:只檢索最大的外部輪廓(extreme outer),沒有層級關系,只取根節點的輪廓。
CV_RETR_LIST:檢索所有輪廓,但是沒有 Parent 和 Child 的層級關系,所有輪廓都是同級的。
CV_RETR_CCOMP:檢索所有輪廓,並且按照二級結構組織:外輪廓和內輪廓。以前面的大圖為例,0、1、2、3、4、5 都屬於第0層,2a 和 3a 都屬於第1層。
CV_RETR_TREE:檢索所有輪廓,並且按照嵌套關系組織層級。以前面的大圖為例,0、1、2 屬於第0層,2a 屬於第1層,3 屬於第2層,3a 屬於第3層,4、5 屬於第4層。
method:邊緣近似的方法,包括:
CV_CHAIN_APPROX_NONE:嚴格存儲所有邊緣點,即:序列中任意兩個點的距離均為1。
CV_CHAIN_APPROX_SIMPLE:壓縮邊緣,通過頂點繪制輪廓。
drawContours
drawContours 是繪制邊緣的函數,可以傳入 findContours 函數返回的輪廓結果,在目標圖像上繪制輪廓。函數定義如下:
Python: cv2.drawContours(image, contours, contourIdx, color) → image
其中:
image:目標圖像,直接修改目標的像素點,實現繪制。
contours:需要繪制的邊緣數組。
contourIdx:需要繪制的邊緣索引,如果全部繪制則為 -1。
color:繪制的顏色,為 BGR 格式的 Scalar 。
thickness:可選,繪制的密度,即描繪輪廓時所用的畫筆粗細。
lineType: 可選,連線類型,分為以下幾種:
LINE_4:4-connected line,只有相鄰的點可以連接成線,一個點有四個相鄰的坑位。
LINE_8:8-connected line,相鄰的點或者斜對角相鄰的點可以連接成線,一個點有四個相鄰的坑位和四個斜對角相鄰的坑位,所以一共有8個坑位。
LINE_AA:antialiased line,抗鋸齒連線。
hierarchy:可選,如果需要繪制某些層級的輪廓時作為層級關系傳入。
maxLevel:可選,需要繪制的層級中的最大級別。如果為1,則只繪制最外層輪廓,如果為2,繪制最外層和第二層輪廓,以此類推。
moments
矩(moment)起源於物理學的力矩,最早由阿基米德提出,後來發展到統計學,再後來到數學進行歸納。本質上來講,物理學和統計學的矩都是數學上矩的特例。
物理學中的矩表示作用力促使物體繞著支點旋轉的趨向,通俗理解就像是擰螺絲時用的扭轉的力,由矢量和作用力組成。
數學中的矩用來描述數據分布特征的一類數字特征,例如:算術平均數、方差、標准差、平均差,這些值都是矩。在實數域上的實函數 f(x) 相對於值 c 的 n 階矩為:

常用的矩有兩類:
原點矩(raw moment):相對原點的矩,即當 c 為 0 的時候。1階原點矩為期望,也成為中心。
中心矩(central moment):相對於中心點的矩,即當 c 為 E(x) 的時候。1階中心矩為0,2階中心矩為方差。
到了圖像處理領域,對於灰度圖(單通道,每個像素點由一個數值來表示)而言,把坐標看成二維變量 (X, Y),那麼圖像可以用二維灰度密度函數 I(x, y) 來表示。
簡單來講,圖像的矩就是圖像的像素相對於某個點的分布情況統計,是圖像的一種特征描述。
raw moment
圖像的原點矩(raw moment)是相對於原點的矩,公式為:

對於圖像的原點矩而言:
M00 相當於權重系數為 1 。將所有 I(x, y) 相加,對於二值圖像而言,相當於將每個點記為 1 然後求和,也就是圖像的面積;對於灰度圖像而言,則是圖像的灰度值的和。
M10 相當於權重為 x 。對二值圖像而言,相當於將所有的 x 坐標相加。
M01 相當於權重為 y 。對二值圖像而言,相當於將所有的 y 坐標相加。
圖像的幾何中心(centroid)等於 (M10 / M00 , M01 / M00)。
central moment
圖像的中心矩(central moment)是相對於幾何中心的矩,公式為:

可以看到,中心矩表現的是圖像相對於幾何中心的分布情況。一個通用的描述中心矩和原點矩關系的公式是:

中心矩在圖像處理中的一個應用便是尋找不變矩(invariant moments),這是一個高度濃縮的圖像特征。
所謂的不變性有三種,分別對應圖像處理中的三種仿射變換:
平移不變性(translation invariants):中心矩本身就具有平移不變性,因為它是相對於自身的中心的分布統計,相當於是采用了相對坐標系,而平移改變的是整體坐標。
縮放不變性(scale invariants):為了實現縮放不變性,可以構造一個規格化的中心矩,即將中心矩除以 (1+(i+j)/2) 階的0階中心矩,具體公式見 《Wiki: scale invariants》。
旋轉不變性(rotation invariants):通過2階和3階的規格化中心矩可以構建7個不變矩組,構成的特征量具有旋轉不變性。具體可以看 《Wiki: rotation invariants》。
Hu moment 和 Zernike moment 之類的內容就不繼續展開了,感興趣的可以翻閱相關文章。
OpenCV + QRCode
接下來就是將 QRCode 和 OpenCV 結合起來的具體使用了。
初步構想的識別步驟如下:
加載圖像,並且進行一些預處理,比如通過高斯模糊去噪。
通過 Canny 邊緣檢測算法,找出圖像中的邊緣
尋找邊緣中的輪廓,將嵌套層數大於 4 的邊緣找出,得到 Position Detection Pattern 。
如果上一步得到的結果不為 3 ,則通過 Timing Pattern 去除錯誤答案。
計算定位標記的最小矩形包圍盒,獲得三個最外圍頂點,算出第四個頂點,從而確定二維碼的區域。
計算定位標記的幾何中心,連線組成三角形,從而修正坐標,得到仿射變換前的 QRCode 。
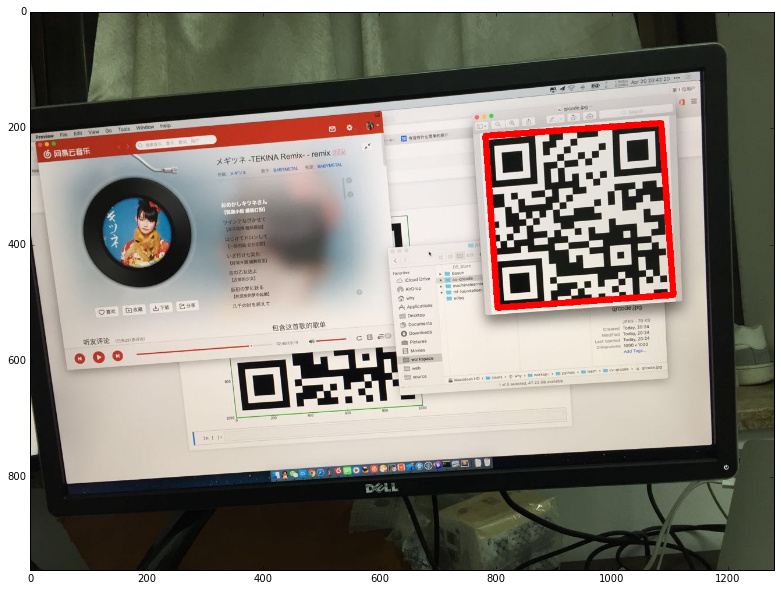
在接下來的內容裡,將會嘗試用 OpenCV 識別下圖中的二維碼:
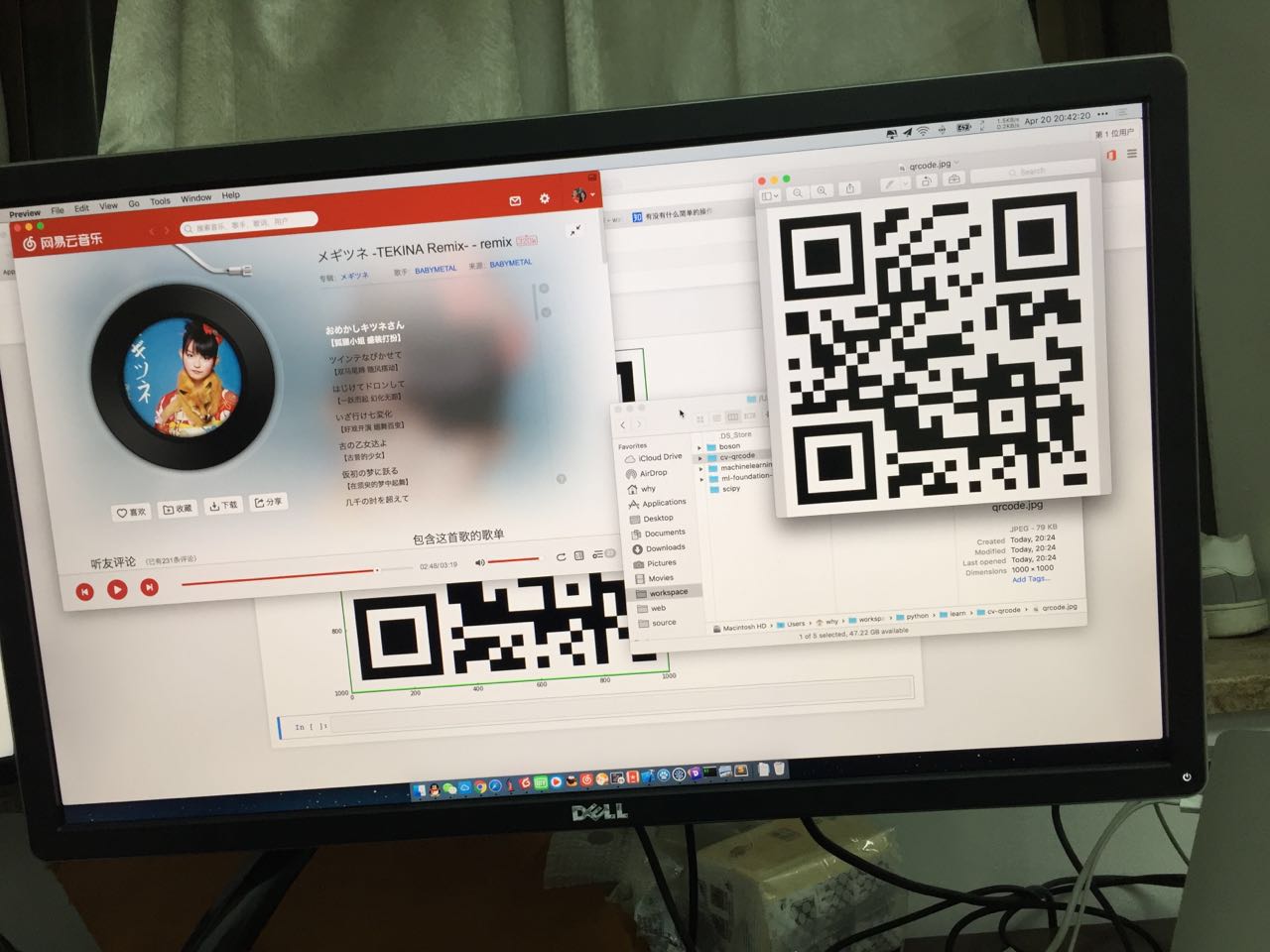
加載圖像
首先加載圖像,並通過 matplotlib 顯示圖像查看效果:
%matplotlib inline
import cv2
from matplotlib import pyplot as plt
import numpy as np
def show(img, code=cv2.COLOR_BGR2RGB):
cv_rgb = cv2.cvtColor(img, code)
fig, ax = plt.subplots(figsize=(16, 10))
ax.imshow(cv_rgb)
fig.show()
img = cv2.imread('1.jpg')
show(img)
OpenCV 中默認是 BGR 通道,通過 cvtColor 函數將原圖轉換成灰度圖:
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
邊緣檢測
有了灰度圖之後,接下來用 Canny 邊緣檢測算法檢測邊緣。
Canny 邊緣檢測算法主要是以下幾個步驟:
用高斯濾波器平滑圖像去除噪聲干擾(低通濾波器消除高頻噪聲)。
生成每個點的亮度梯度圖(intensity gradients),以及亮度梯度的方向。
通過非極大值抑制(non-maximum suppression)縮小邊緣寬度。非極大值抑制的意思是,只保留梯度方向上的極大值,刪除其他非極大值,從而實現銳化的效果。
通過雙阈值法(double threshold)尋找潛在邊緣。大於高阈值為強邊緣(strong edge),保留;小於低阈值則刪除;不大不小的為弱邊緣(weak edge),待定。
通過遲滯現象(Hysteresis)處理待定邊緣。弱邊緣有可能是邊緣,也可能是噪音,判斷標准是:如果一個弱邊緣點附近的八個相鄰點中,存在一個強邊緣,則此弱邊緣為強邊緣,否則排除。
在 OpenCV 中可以直接使用 Canny 函數,不過在那之前要先用 GaussianBlur 函數進行高斯模糊:
img_gb = cv2.GaussianBlur(img_gray, (5, 5), 0)
接下來使用 Canny 函數檢測邊緣,選擇 100 和 200 作為高低阈值:
edges = cv2.Canny(img_gray, 100 , 200)
執行結果如下:
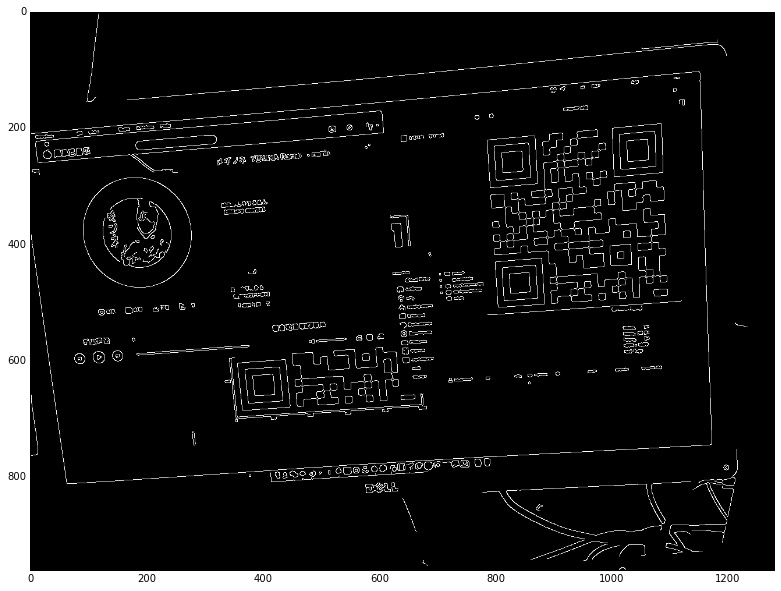
可以看到圖像中的很多噪音都被處理掉了,只剩下了邊緣部分。
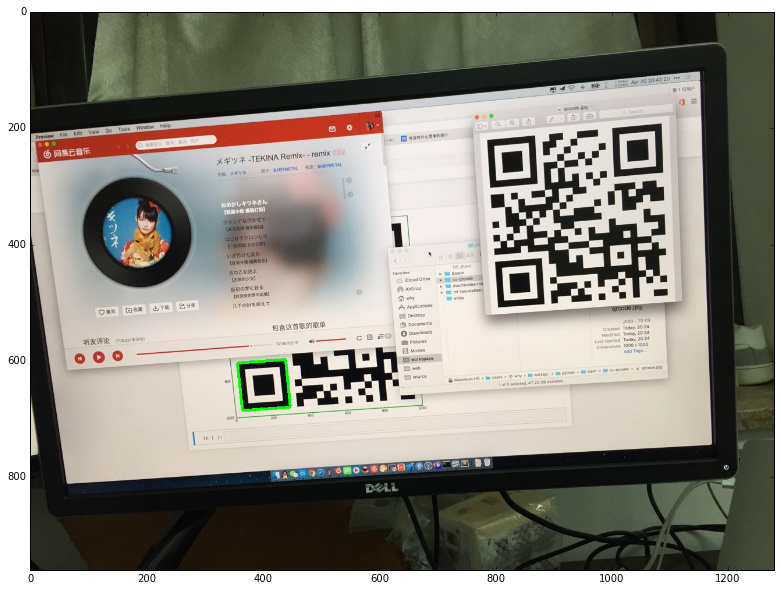
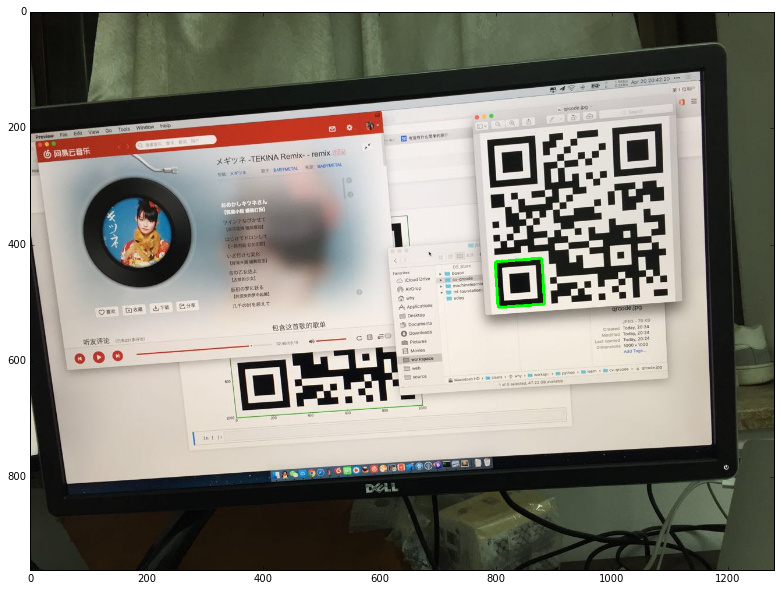
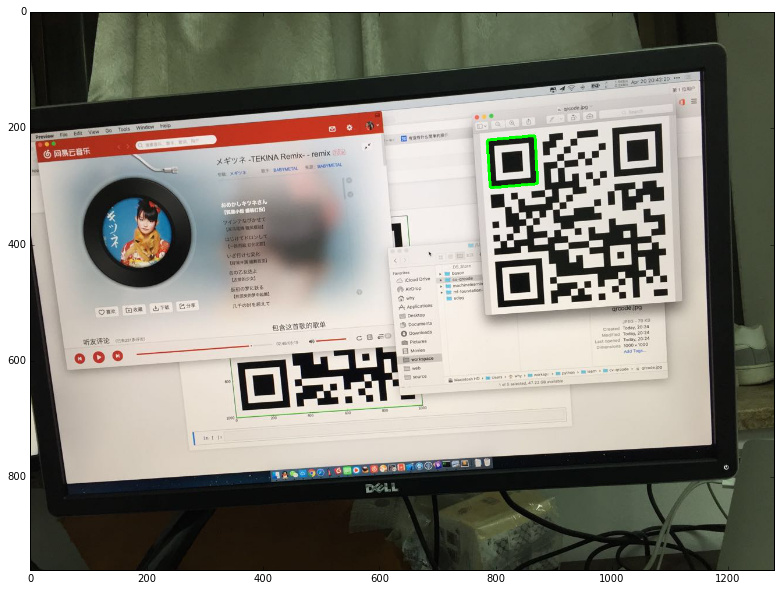
尋找定位標記
有了邊緣之後,接下來就是通過輪廓定位圖像中的二維碼。二維碼的 Position Detection Pattern 在尋找輪廓之後,應該是有6層(因為一條邊緣會被識別出兩個輪廓,外輪廓和內輪廓):
所以,如果簡單處理的話,只要遍歷圖像的層級關系,然後嵌套層數大於等於5的取出來就可以了:
img_fc, contours, hierarchy = cv2.findContours(edges, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
hierarchy = hierarchy[0]
found = []
for i in range(len(contours)):
k = i
c = 0
while hierarchy[k][2] != -1:
k = hierarchy[k][2]
c = c + 1
if c >= 5:
found.append(i)
for i in found:
img_dc = img.copy()
cv2.drawContours(img_dc, contours, i, (0, 255, 0), 3)
show(img_dc)
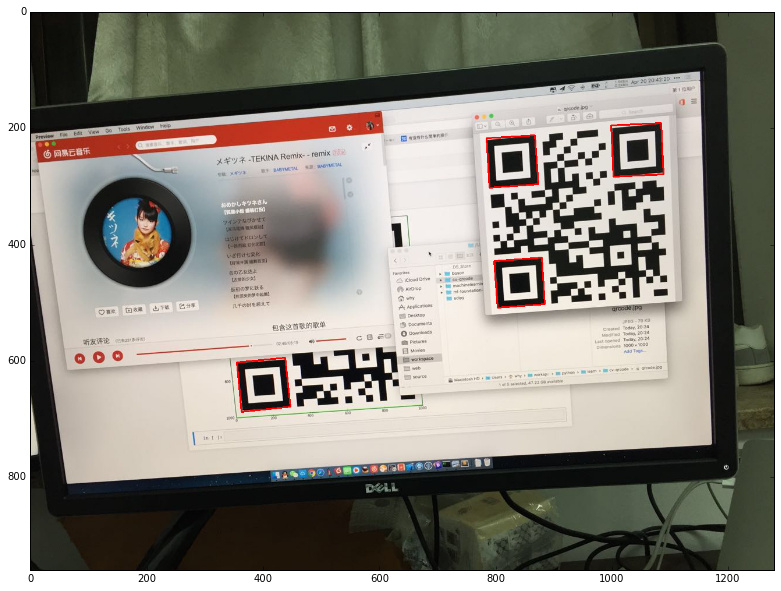
繪制結果如下:
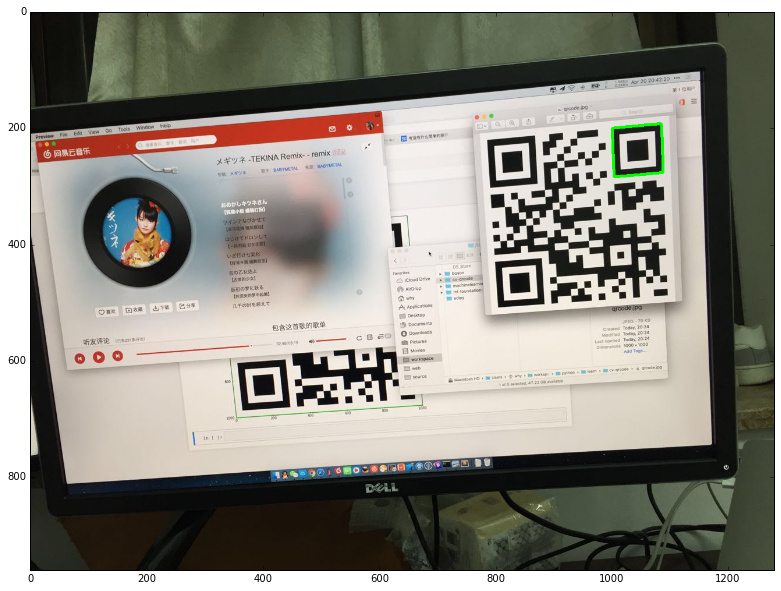
定位篩選
接下來就是把所有找到的定位標記進行篩選。如果剛好找到三個那就可以直接跳過這一步了。然而,因為這張圖比較特殊,找出了四個定位標記,所以需要排除一個錯誤答案。
講真,如果只靠三個 Position Detection Pattern 組成的直角三角形,是沒辦法從這四個當中排除錯誤答案的。因為,一方面會有形變的影響,比如斜躺著的二維碼,本身三個頂點連線就不是直角三角形;另一方面,極端情況下,多余的那個標記如果位置比較湊巧的話,完全和正確結果一模一樣,比如下面這種情況:

所以我們需要 Timing Pattern 的幫助,也就是定位標記之間的黑白相間的那兩條黑白相間的線。解決思路大致如下:
將4個定位標記兩兩配對
將他們的4個頂點兩兩連線,選出最短的那兩根
如果兩根線都不符合 Timing Pattern 的特征,則出局
尋找定位標記的頂點
找的的定位標記是一個輪廓結果,由許多像素點組成。如果想找到定位標記的頂點,則需要找到定位標記的矩形包圍盒。先通過 minAreaRect 函數將檢查到的輪廓轉換成最小矩形包圍盒,並且繪制出來:
draw_img = img.copy()
for i in found:
rect = cv2.minAreaRect(contours[i])
box = cv2.boxPoints(rect)
box = np.int0(box)
cv2.drawContours(draw_img,[box], 0, (0,0,255), 2)
show(draw_img)
繪制如下:
這個矩形包圍盒的四個坐標點就是頂點,將它存儲在 boxes 中:
boxes = []
for i in found:
rect = cv2.minAreaRect(contours[i])
box = cv2.boxPoints(rect)
box = np.int0(box)
box = map(tuple, box)
boxes.append(box)
定位標記的頂點連線
接下來先遍歷所有頂點連線,然後從中選擇最短的兩根,並將它們繪制出來:
def cv_distance(P, Q):
return int(math.sqrt(pow((P[0] - Q[0]), 2) + pow((P[1] - Q[1]),2)))
def check(a, b):
# 存儲 ab 數組裡最短的兩點的組合
s1_ab = ()
s2_ab = ()
# 存儲 ab 數組裡最短的兩點的距離,用於比較
s1 = np.iinfo('i').max
s2 = s1
for ai in a:
for bi in b:
d = cv_distance(ai, bi)
if d < s2:
if d < s1:
s1_ab, s2_ab = (ai, bi), s1_ab
s1, s2 = d, s1
else:
s2_ab = (ai, bi)
s2 = d
a1, a2 = s1_ab[0], s2_ab[0]
b1, b2 = s1_ab[1], s2_ab[1]
# 將最短的兩個線畫出來
cv2.line(draw_img, a1, b1, (0,0,255), 3)
cv2.line(draw_img, a2, b2, (0,0,255), 3)
for i in range(len(boxes)):
for j in range(i+1, len(boxes)):
check(boxes[i], boxes[j])
show(draw_img)
繪制結果如下:
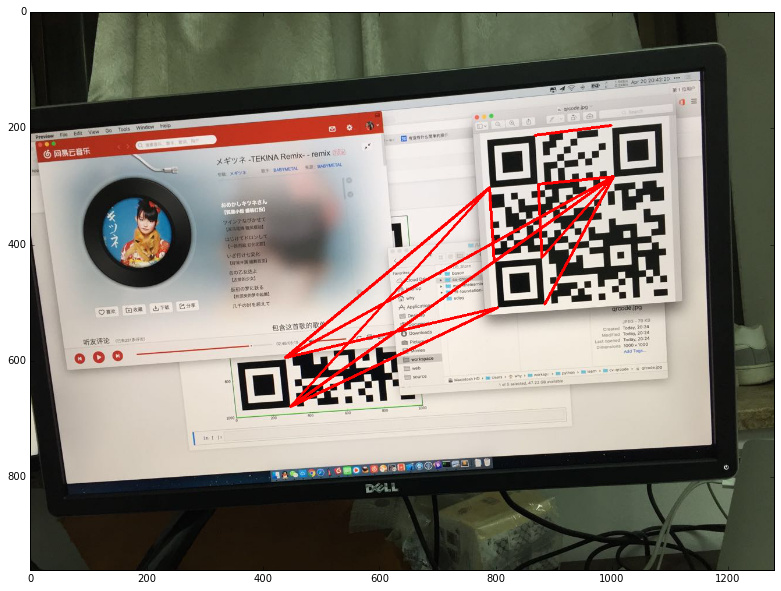
獲取連線上的像素值
有了端點連線,接下來需要獲取連線上的像素值,以便後面判斷是否是 Timing Pattern 。
在這之前,為了更方便的判斷黑白相間的情況,先對圖像進行二值化:
th, bi_img = cv2.threshold(img_gray, 100, 255, cv2.THRESH_BINARY)
接下來是獲取連線像素值。由於 OpenCV3 的 Python 庫中沒有 LineIterator ,只好自己寫一個。在《OpenCV 3.0 Python LineIterator》這個問答裡找到了可用的直線遍歷函數,可以直接使用。
以一條 Timing Pattern 為例:
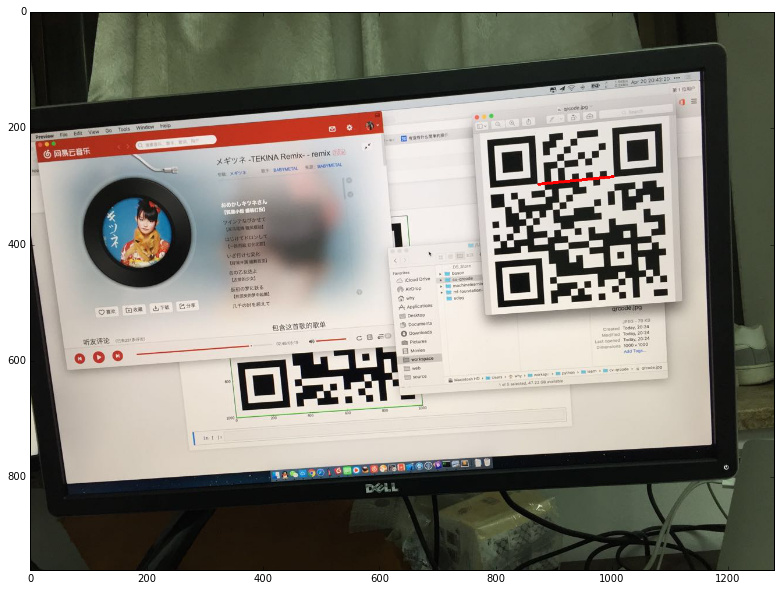
打印其像素點看下結果:
[ 255. 255. 255. 255. 255. 255. 255. 255. 255. 255. 255. 0.
0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.
0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.
0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.
0. 255. 255. 255. 0. 0. 0. 0. 0. 0. 0. 0.
0. 0. 0. 0. 0. 0. 0. 0. 0. 255. 255. 255.
255. 255. 255. 255. 255. 255. 255. 255. 255. 255. 255. 255.
255. 255. 255. 255. 255. 255. 255. 255. 255. 255. 255. 255.
0. 0. 0. 255. 255. 255. 255. 255. 255. 255. 255. 255.
255. 0. 255. 255. 255. 255. 255. 255. 255. 255. 255. 255.
255. 255. 255. 255. 255. 255. 255. 255. 255.]
修正端點位置
照理說, Timing Pattern 的連線,像素值應該是黑白均勻相間才對,為什麼是上面的這種一連一大片的結果呢?
仔細看下截圖可以發現,由於取的是定位標記的外部包圍盒的頂點,所以因為誤差會超出定位標記的范圍,導致沒能正確定位到 Timing Pattern ,而是相鄰的 Data 部分的像素點。
為了修正這部分誤差,我們可以對端點坐標進行調整。因為 Position Detection Pattern 的大小是固定的,是一個 1-1-3-1-1 的黑白黑白黑相間的正方形,識別 Timing Pattern 的最佳端點應該是最靠裡的黑色區域的中心位置,也就是圖中的綠色虛線部分:
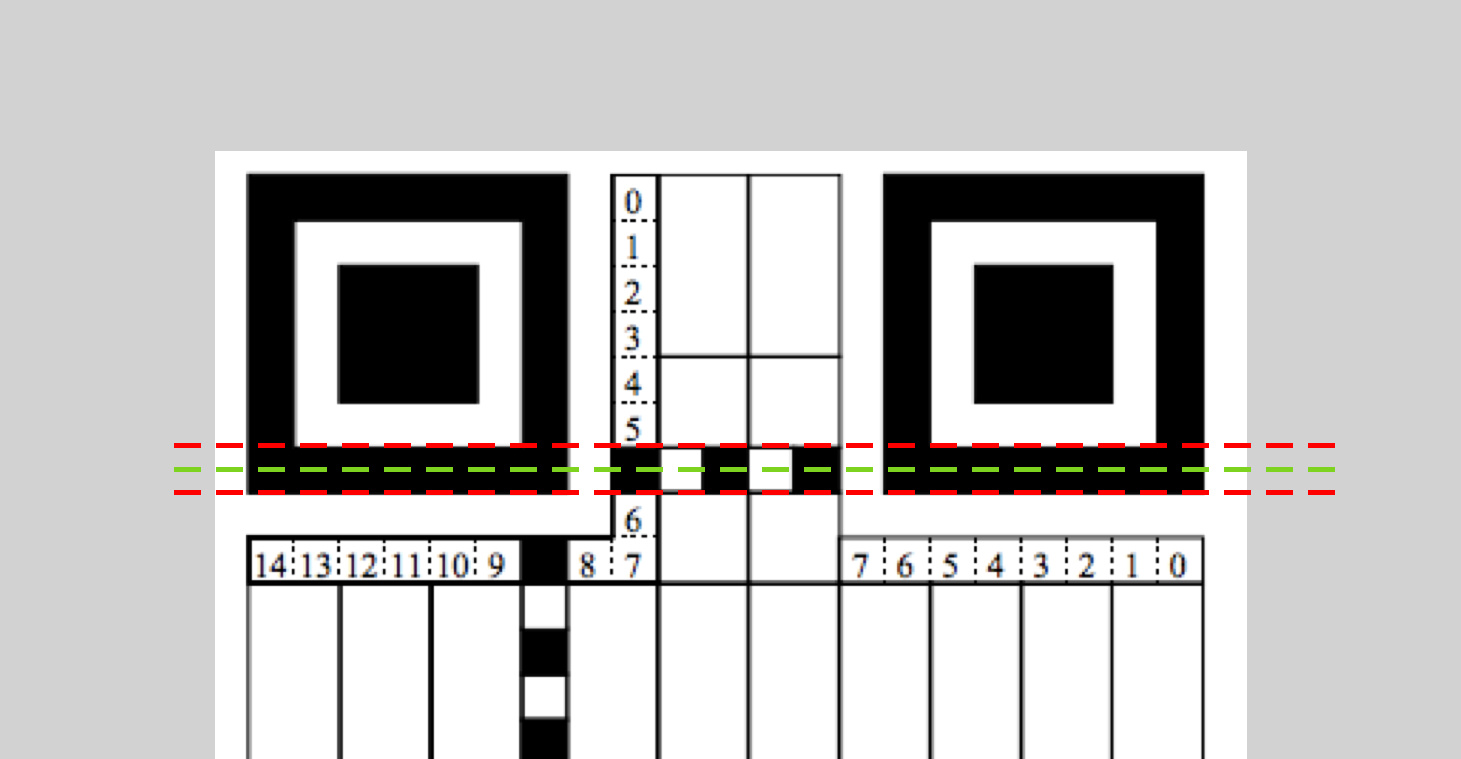
所以我們需要對端點坐標進行調整。調整方式是,將一個端點的 x 和 y 值向另一個端點的 x 和 y 值靠近 1/14 個單位距離,代碼如下:
a1 = (a1[0] + (a2[0]-a1[0])*1/14, a1[1] + (a2[1]-a1[1])*1/14)
b1 = (b1[0] + (b2[0]-b1[0])*1/14, b1[1] + (b2[1]-b1[1])*1/14)
a2 = (a2[0] + (a1[0]-a2[0])*1/14, a2[1] + (a1[1]-a2[1])*1/14)
b2 = (b2[0] + (b1[0]-b2[0])*1/14, b2[1] + (b1[1]-b2[1])*1/14)
調整之後的像素值就是正確的 Timing Pattern 了:
[ 255. 255. 255. 255. 255. 255. 255. 255. 255. 255. 255. 0.
0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 255. 255.
255. 255. 255. 255. 255. 255. 255. 255. 255. 255. 255. 0.
0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 255. 255.
255. 255. 255. 255. 255. 255. 255. 255. 255. 255. 255. 0.
0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 255. 255.
255. 255. 255. 255. 255. 255. 255. 255. 255. 255. 0. 0.
0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 255. 255.
255. 255. 255. 255. 255. 255. 255. 255. 255. 255. 0. 0.
0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 255. 255.
255. 255. 255. 255. 255. 255. 255. 255. 255.]
驗證是否是 Timing Pattern
像素序列拿到了,接下來就是判斷它是否是 Timing Pattern 了。 Timing Pattern 的特征是黑白均勻相間,所以每段同色區域的計數結果應該相同,而且旋轉拉伸平移都不會影響這個特征。
於是,驗證方案是:
先除去數組中開頭和結尾處連續的白色像素點。
對數組中的元素進行計數,相鄰的元素如果值相同則合並到計數結果中。比如 [0,1,1,1,0,0] 的計數結果就是 [1,3,2] 。
計數數組的長度如果小於 5 ,則不是 Timing Pattern 。
計算計數數組的方差,看看分布是否離散,如果方差大於阈值,則不是 Timing Pattern 。
代碼如下:
def isTimingPattern(line):
# 除去開頭結尾的白色像素點
while line[0] != 0:
line = line[1:]
while line[-1] != 0:
line = line[:-1]
# 計數連續的黑白像素點
c = []
count = 1
l = line[0]
for p in line[1:]:
if p == l:
count = count + 1
else:
c.append(count)
count = 1
l = p
c.append(count)
# 如果黑白間隔太少,直接排除
if len(c) < 5:
return False
# 計算方差,根據離散程度判斷是否是 Timing Pattern
threshold = 5
return np.var(c) < threshold
對前面的那條連線檢測一下,計數數組為:
[11, 12, 11, 12, 11, 12, 11, 13, 11]
方差為 0.47 。其他非 Timing Pattern 的連線方差均大於 10 。
找出錯誤的定位標記
接下來就是利用前面的結果除去錯誤的定位標記了,只要兩個定位標記的端點連線中能找到 Timing Pattern ,則這兩個定位標記有效,把它們存進 set 裡:
valid = set()
for i in range(len(boxes)):
for j in range(i+1, len(boxes)):
if check(boxes[i], boxes[j]):
valid.add(i)
valid.add(j)
print valid
結果是:
set([1, 2, 3])
好了,它們中出了一個叛徒,0、1、2、3 四個定位標記,0是無效的,1、2、3 才是需要識別的 QRCode 的定位標記。
找出二維碼
有了定位標記之後,找出二維碼就輕而易舉了。只要找出三個定位標記輪廓的最小矩形包圍盒,那就是二維碼的位置了:
contour_all = np.array([])
while len(valid) > 0:
c = found[valid.pop()]
for sublist in c:
for p in sublist:
contour_all.append(p)
rect = cv2.minAreaRect(contour_ALL)
box = cv2.boxPoints(rect)
box = np.array(box)
draw_img = img.copy()
cv2.polylines(draw_img, np.int32([box]), True, (0, 0, 255), 10)
show(draw_img)
繪制結果如下:
小結
後面仿射變換後坐標修正的問題實在是寫不動了,這篇就先到這裡吧。
回頭看看,是不是感覺繞了個大圈子?
『費了半天勁,只是為了告訴我第0個定位標記是無效的,我看圖也看出來了啊!』
是的,不過代碼裡能看到的只是像素值和它們的坐標,為了排除這個錯誤答案確實花了不少功夫。
不過這也是我喜歡做數字圖像處理的原因之一:可用函數數不勝數,專業概念層出不窮,同樣的一個問題,不同的人去解決,就有著不同的答案,交流的過程便是學習的過程。
啊對了,如果有更好的解決方案,歡迎在評論裡指出!
以及,文章裡有一個紅包彩蛋,你找到了嗎 =。=
財富!名譽!地位!窮得叮當響的海賊汪,哥爾·D·汪海,他在臨睡前的一句話讓人們趨之若鹜奔向博客:『想要我的紅包嗎?想要的話可以全部給你,去找吧!我把所有紅包都放在那裡!』
參考文獻:
二維碼的生成細節和原理
What is a QR code?
ISO/IEC 18004: QRCode Standard
What Are The Different Sections In A QR Code?
Decoding small QR codes by hand
How data matrix codes work
QR Code Tutorial
How to Read QR Symbols Without Your Mobile Telephone
OpenCV: QRCode detection and extraction
Tutorial Python: Contours Hierarchy
Wiki: Pixel Connectivity
Image Processing: Connect
Wiki: Image Moment
Wiki: Moment (Mathematics))
圖像的矩特征
統計數據的形態特征
圖像的矩(Image Moments)
OpenCV Doc: Structural analysis and shape descriptors
CS7960 AdvImProc MomentInvariants
OpenCV Doc: Canny
Wiki: Canny Edge Detector
Wiki: Hysteresis
OpenCV 3.0 Python LineIterator



